Что такое шаговый двигатель
Шаговый двигатель - это бесколлекторный электродвигатель постоянного тока, который преобразовывает электрические импульсы в поворот вала на определенный угол.
В отличие от обычного двигателя, ротор шагового двигателя вращается дискретно (шагами). И полный оборот ротора состоит из нескольких шагов.
Соответственно изменяя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно изменять скорость и направление вращения двигателя.
Типы шаговых двигателей
Существует много разновидностей шаговых двигателей.
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
Наиболее распространенные – гибридные шаговые двигатели.
В зависимости от конфигурации обмоток униполярными и биполярными.
-
Униполярные шаговые двигатели. Особенность — наличие отпайки из средней точки, что позволяет с легкостью менять полюса. Минус состоит в применении части витков, поэтому уменьшается момент вращения. Для повышения мощности средний вывод подключать не рекомендуется.
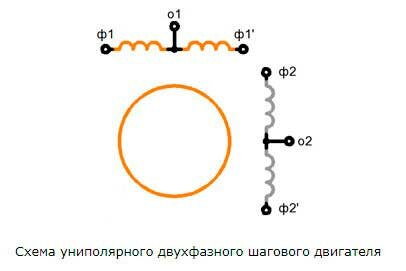
Конструктивно униполярные устройства содержат пять и шесть выводов. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 выводов, или 6 выводов в случае если выводы о1 и о2 разъединены (как на схеме). Униполярный двигатель с двумя обмотками и отводами можно использовать в биполярном режиме, если отводы оставить неподключенными.
Одним из самых распространенных примеров униполярного шагового двигателя с пятью выводами может быть шаговый двигатель RKP-28BYJ-48-5V.

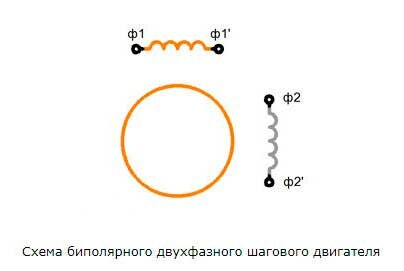
Биполярные шаговые двигатели. К этой группе относится шаговый двигатель, подключаемый к контроллеру через четыре отпайки. Обмотки могут объединятся в параллель или последовательно. Для изменения направления тока применяются так называемые чипы, обеспечивающие ручное управление. Достижение такого эффекта доступно с помощью Н-моста. Если сравнивать с униполярным видом, биполярный тип гарантирует тот же момент, но при меньших размерах.
Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим - ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим - ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим - ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Угловой шаг
Большинство моделей шаговых двигателей имеет 200 шагов на оборот, т.е. 1.8° на шаг. Кроме этого производятся двигатели с шагом в 0.9°(400 шагов на оборот). Использование микрошагового режима, позволяет делить шаг без потери точности на 8-16 микрошагов. Некоторые модели драйверов, могут делить шаг на 256 (драйвер TMC2209-UART) и даже 512 микрошагов (драйвер RKP-DM860H). Но практическое значение таких делений невелико - во-первых, для совершения каждого микрошага требуется подать отдельный импульс STEP, соответственно, требуется очень высокая частота импульсов, во-вторых, точность перестает расти уже после деления шага на 10-16 частей. Основным применением таких режимов остается повышение плавности хода двигателя.
В машиностроении наибольшее распространения на сегодняшний день получили гибридные шаговые двигатели с угловым перемещением 1,8°/шаг (200 шагов/оборот) или 0,9°/шаг (400 шагов на оборот).
Классификация шаговых двигателей
Шаговые двигатели стандартизованы по посадочным размерам и размеру фланца: NEMA 14, NEMA 16, NEMA 17, NEMA 23, NEMA 34 и др.
Например, NEMA23 имеют размер корпуса 2,3 дюйма (57 мм) и могут создавать крутящий момент до 30 кгс⋅см.
При этом длина корпуса может изменяться от двигателя к двигателю в рамках одного размера. С увеличение длины корпуса увеличивается и крутящий момент двигателя.
NEMA14 (Например: Nema14-14HY0007-20)
- Габаритные размеры: 35х35 мм
- Диапазон длин: 26 - 36 мм
NEMA16 (Например: Nema16-FL39ST38-0504A)
- Габаритные размеры: 39х39 мм
- Диапазон длин: 20 - 30 мм
NEMA17 (Например: Nema17-17HS1011-20B, Nema17-60mm-6kg, Nema17-40mm-DS, Nema17-60mm-DS)
- Габаритные размеры: 42х42 мм
- Диапазон длин: 25 - 60 мм
NEMA23 (Например: Nema23-56mm-12kg-6, Nema23-50mm-DS-8)
- Габаритные размеры: 56х56 мм
- Диапазон длин: 41 - 76 мм
NEMA34 (Например: Nema34-150mm-130kg)
- Габаритные размеры: 86х86 мм
- Диапазон длин: 65 - 156 мм
Драйвер шагового двигателя
Сложная схема управления шаговым двигателем требует специального электронного устройства – драйвера шагового двигателя.
Драйвер - это элемент схемы, предназначенный для управления обмотками мотора путем подачи цифровых сигналов.
Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные. Тип двигателя является самым важным фактором при выборе драйвера.
- Биполярный двигатель можно подключить только к драйверу биполярных двигателей.
- 6-выводной двигатель можно подключить к любому драйверу. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.
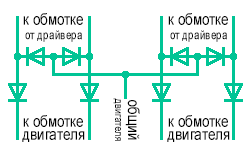
- Униполярный двигатель, при необходимости, можно подключить и к драйверу биполярного двигателя по схеме из нескольких диодов (лучше использовать диоды Шоттки), но такое подключение гарантирует корректность работы униполярного двигателя только в полношаговом режиме.
Задача драйвера – изменять ток в обмотках как можно более эффективно.
По способу закачки тока в обмотки на сегодняшний момент наиболее популярны ШИМ-драйверы шаговых двигателей.
Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижению током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем, иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны, и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода.
ШИМ-драйверы могут сильно отличаются друг от друга по электрическим характеристикам, параметрам управления, размерам и техническим характеристикам.
Электрические характеристики включают в себя максимальное напряжение на входе, номинальную мощность, силу тока на выходе, максимальная сила тока на выходе, питание переменным и постоянным током.
Помимо этого у драйверов отличается частота ШИМ. Лучше, если частота драйвера будет более 20 кГц.
Если производитель шагового двигателя указал напряжение для обмотки (как правило, оно весьма мало, порядка 1-5 В), то максимальное напряжение для драйвера рассчитывается Umax = U*25. То есть превышение номинального напряжения более чем в 23-25 раз может привести к перегреву двигателя и выходу его из строя!
Если номинальное напряжение питания обмоток не известно. Максимальное питающее напряжение двигателя можно определить исходя из индуктивности.
Umax = 32 * √L , где L — индуктивность обмотки в мГн.
Мощность, потребляемую двигателем, можно оценить, перемножив полученное в расчетах максимальное напряжение питания на 2/3 от номинального тока двигателя. Например, 32*sqrt(2.4 мГн) * 2/3 * 3 А = примерно 100 Ватт.
Формула дает приблизительную оценку. В реальности потребление много ниже, и составляет примерно: двигатели серии 57 мм — 40-70 ватт, двигатели 86 серии — 65-120 ватт на двигатель, в зависимости от нагрузки, выставленного тока на драйверах и т.п.
Так же желательно, что бы драйвер имеет защиту от обратной индуцированной шаговыми двигателями ЭДС.
Подбор драйвера
Для того, что бы узнать подходит ли драйвер для шагового двигателя необходимо:
- Проверить, может ли драйвер выдавать ток фазы, равный (или примерно равный) току, указанному производителем двигателя. Если ток драйвера заметно меньше тока фазы двигателя - драйвер не подходит.
- Проверить максимальное напряжение питания двигателя. Желательно, чтобы максимально допустимое напряжение питания драйвера было примерно равно этому значению, или было немного больше. Если это условие не выполняется, то скорее всего двигатель вращаться будет, но больших скоростей достичь не удастся.














