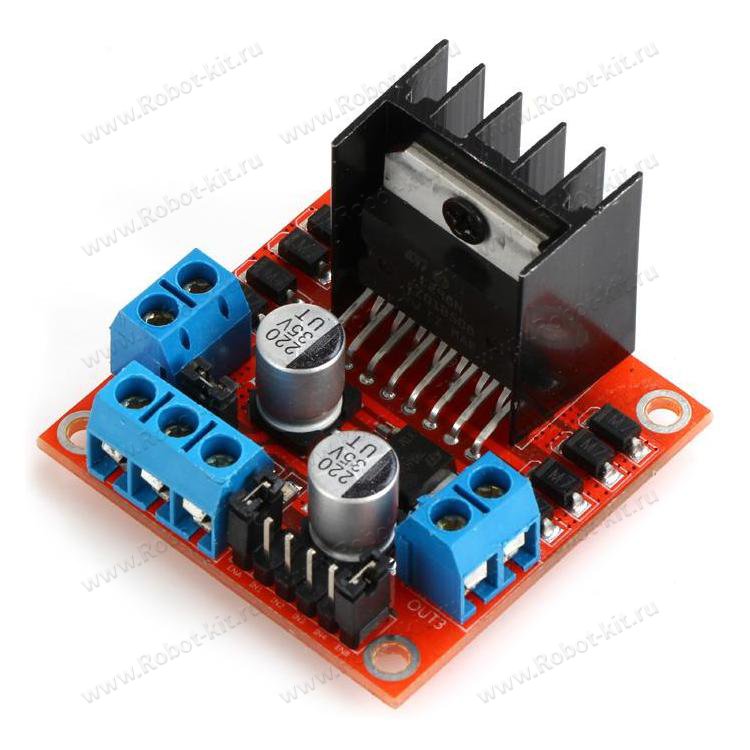
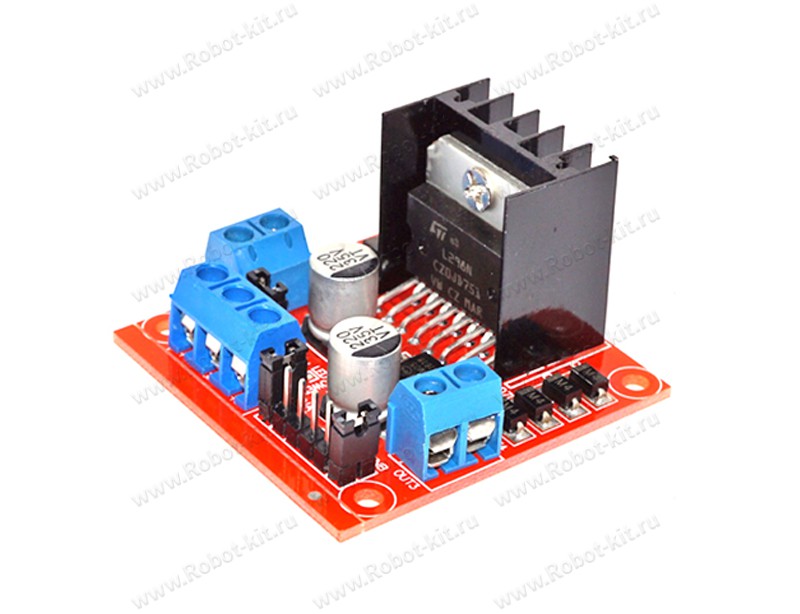
Драйвер моторов RKP-01A-V2 двухканальный L298N









Описание
Двухканальном драйвере моторов RKP-MDL298-01A-V2 на микросхеме L298N.
С его помощью можно контролировать вращение двух независимых коллекторных моторов постоянного тока (DC-моторов) или одного двухобмоточного четырехпроводного шагового двигателя.
Драйвер двигателей RKP-01A-V2 благодаря микросхеме драйвера моторов L298N позволяет легко управлять двумя электромоторами использующими питание от 5В до 35В. Установленный на основную микросхему L298N радиатор охлаждения позволяет выдерживать ток нагрузки до 2A на канал. Для защиты драйвера моторов от перегрузки используются специальные Диоды Shotki. Модуль контроллера двигателей позволяет использовать его в различных робототехнических проектах, размещая его по своему усмотрению.
 Посмотреть DataSheet микросхемы драйвера моторов L298N (формат PDF размер 611 КБ)
Посмотреть DataSheet микросхемы драйвера моторов L298N (формат PDF размер 611 КБ)
Ключевыми особенностями драйвера моторов RKP-01A-V2 являются наличие радиатора охлаждения L298N, малые габариты и вес (35 грамм), а также светодиодная индикация наличия питания и указания направления вращения двигателей.
Характеристики драйвера моторов RKP-01A-V2 на микросхеме L298N:
- Микросхема драйвера: L298N (с радиатором охлаждения)
- Возможность питания внешней логики (Vss): +5V ~ +7V (внутренний стабилизатор +5В)
- Входное напряжение логической части (Vd): от 6V до 12V
- Входное напряжение управляемой части (Vs): от +5V до +35V
- Рабочий ток внешней логической части (Iss): 0 ~ 36mA
- Ток нагрузки каждой управляемой части (Io): 2A
- Пиковый ток нагрузки каждой управляемой части (Io): 3А
- Максимальная потребляемая мощность: 20Вт (при температуре = 75°C)
- Высокий уровень входного управляющего сигнала (High): 2.3В = Vin = Vss
- Низкий уровень входного управляющего сигнала (Low): -0.3В = Vin = 1.5В
- Рабочая температура окружающей среды: от -25 до +130°C
- Размеры модуля со стойками крепления и радиатором L298: 53 x 47 x 27 мм
- Вес драйвера моторов RKP-01A: 35 грамм
Плата контролера двигателей имеет четыре специальных отверстия и специальные стойки крепления, выполненные из латуни.
Плата расширения RKP-01A может используется вместе с Arduino и устанавливается отдельно от процессорного модуля Arduino. Применяется, например, для построения движущихся роботов на колесном или гусеничном приводе.
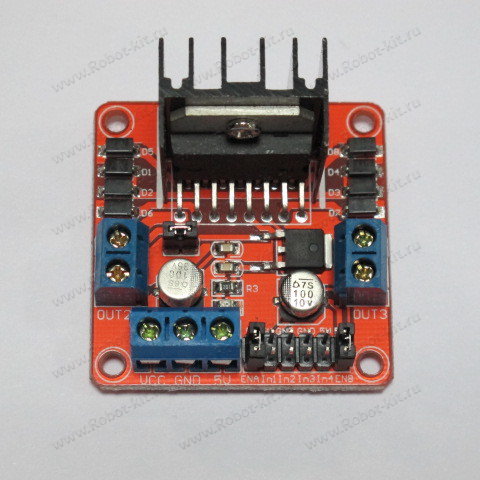
Для подключения моторов постоянного тока (DC-моторов) служат порты:
OUT1 и OUT2 - мотор A
OUT3 и OUT4 – мотор B
(управление электромоторами полностью независимо друг от друга)
Для работы подключите источник питания к контакту тройного клемника "VСС".
При подаче питания от +6V до +12V и одетом джампере JP1, питание подается и на стабилизатор, который выдает +5V для питания логики драйвера. Подавать отдельно питание +5V для логики не нужно.
При подаче питания выше +12V, джампер JP1 должен быть снят. Питание на логику подается отдельно через клемму "+5V".
Управление DC-моторами осуществляется через специальные входы:
ENA (ENB) – надетая перемычка активирует включение канала управления двигателем.
ENA (ENB) - соединить с ШИМ-выходом MCU, для контроля скорости вращения
I1 (I3) и I2 (I4) – логические входы (имеют отключаемые подтягивающие резисторы) задания направления вращения (см. таблицу ниже)
ENA I1 I2 Состояние мотора А PWM>0 0 0 Стоп PWM>0 0 1 Вращение по часовой PWM>0 1 0 Вращение против часовой PWM>0 1 1 Стоп
ENB I3 I4 Состояние мотора B PWM>0 0 0 Стоп PWM>0 0 1 Вращение по часовой PWM>0 1 0 Вращение против часовой PWM>0 1 1 Стоп
Логика управления шаговым двигателем выглядит следующим образом: A, B, C, D, это четыре обмотки шагового двигателя.
Диаграмма ниже (четыре фазы шагового двигателя).
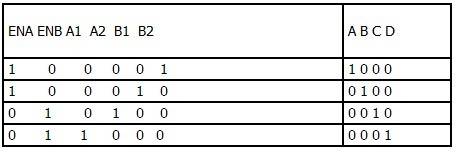
Управление шаговым двигателем осуществляется аналогично управлению двумя DC-моторами.
Драйвер моторов RKP-01A-V2 двухканальный L298N отзывы

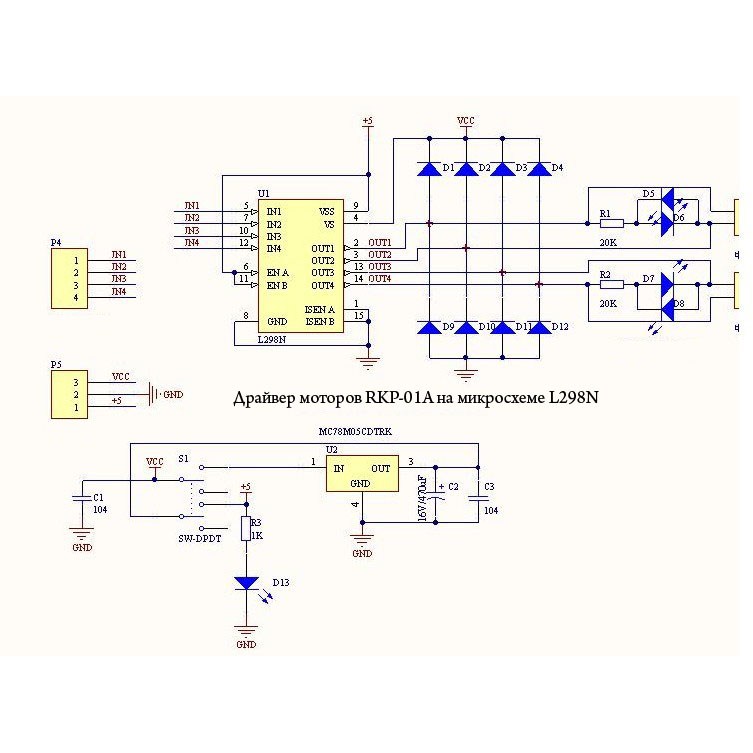
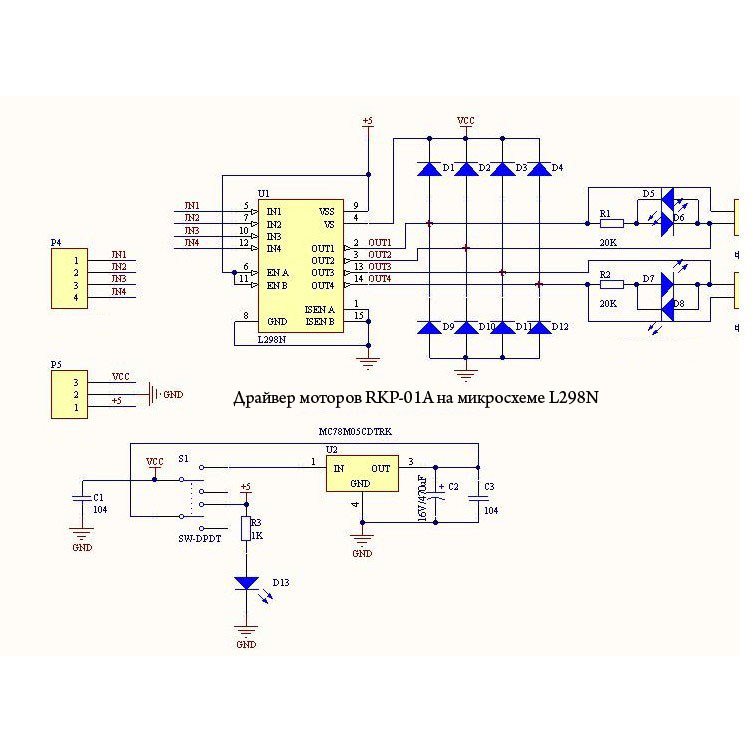
Схема драйвера моторов L298N
Схема драйвера моторов L298N