Энкодер для Ардуино









Описание
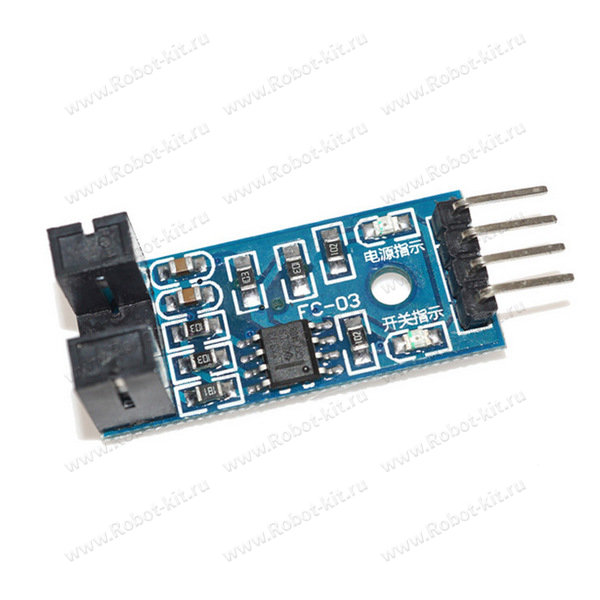
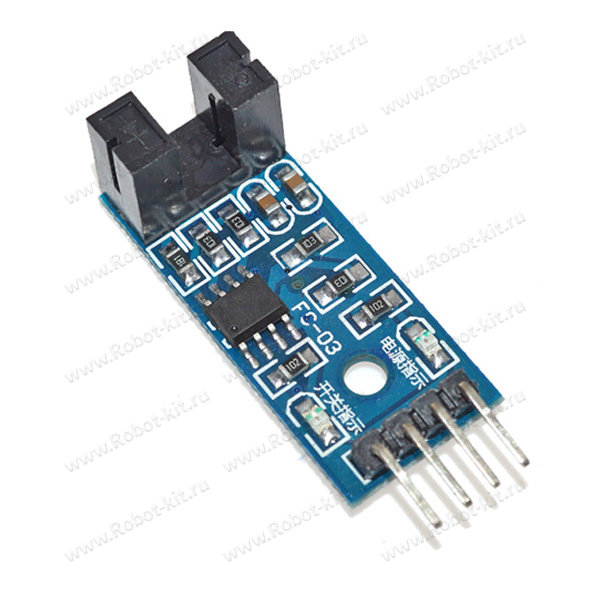
Энкодер для Ардуино RKP-MWES-LM393 - это небольшая печатная плата выполненный на базе микросхемы LM393 и ИК фотодатчика - оптической пары ITR9608.
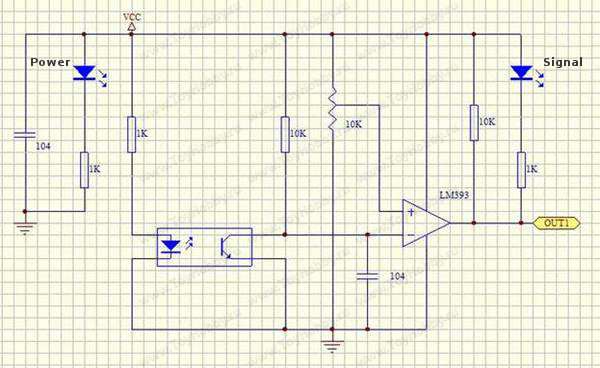
В датчике для Ардуино используется двойной компаратор LM393. Термин «компаратор» произошел от английского слова «compare» — сравнивать. Проще говоря, компаратор — это прибор для сравнения двух или нескольких напряжений с определенной точностью и выдачи результата с минимальной задержкой.
В одном выступе корпуса энкодера расположен инфракрасный светодиод, направленный на фототранзистор находящийся в другом выступе. Если в щель между выступами внести непрозрачную пластину, то ИК излучение от светодиода перекрывается и фототранзистор закрывается. Такой компонент иногда называют фотопрерывателем, но он только фиксирует прерывание светового потока.
По сути это инфракрасный фотоэлектрический модуль с корреляционной обработкой сигнала.
Энкодер RKP-MWES-LM393 может быть использован для определения скорости вращения двигателя, подсчета импульсов, обнаружения препятствия, датчика поворота на нужный угол, бесконтактного концевого выключателя и т.п.
Датчик оборотов RKP-MWES-LM393 снабжен специальным штырьковым разъемом (типа «папа») для подключения к плате микроконтроллера Arduino, AVR, ARM или д.р. Посмотреть/cкачать статью «Управление движением роботов с использованием энкодеров» (формат PDF, размер файла 530 KБ) =>
Посмотреть/cкачать статью «Управление движением роботов с использованием энкодеров» (формат PDF, размер файла 530 KБ) =>
- Эффективная обработка сигналов низкого уровня.
- Простота монтажа, небольшой вес и размеры платы.
- Датчик может использоваться для контроля оборотов двигателя.
Спецификация и характеристики энкодера RKP-MWES-LM393
- Микросхема: LM393 (двойной компаратор)
- Напряжение питания: 3.3 — 5.0 В
- Ток потребления энкодера: 1.4 мА
- Интерфейс или тип выходного сигнала энкодера: цифровой TTL
- Выходной формат: цифровой выход (0 и 1)
- Цифровой выход сигнала: рабочее напряжение на выходе 5 В
- Подключается непосредственно к микроконтроллеру
- Рабочая температура: от 0 °C ~ + 70 °C
- Ширина зазора: 10 мм
- Размеры энкодера (ДxШxВ): 32 x 14 x 7 мм
- Вес модуля датчика оборотов: 8 грамм
- Диаметр отверстия для монтажа датчика оборотов: 3 мм
Обозначение выводов датчика
Вывод с меткой «VCC» –> плюс питания (+3.3V ~ +5.5V)
Вывод с меткой «GND» –> минус питания
Вывод с меткой «DO» –> цифровой выход
Вывод с меткой «AO» –> аналоговый выход (выход от оптопары ITR9608)
Спецификация на микросхему LM393:
- Тип компаратора: прецизионный (Precision)
- Количество компараторов в микросхеме LM393: 2 штуки
- Время отклика компаратора составляет: 1.3 мкс
- Тип выхода компаратора: CMOS, MOS, TTL, DTL, ECL
- Ток потребления компаратора составляет: 1 мА
- Диапазон напряжения питания компаратора: от ± 1.0 В до ± 18 В Посмотреть DataSheet микросхемы LM393 (формат PDF размер 144 КБ) =>>
Датчик оборотов или энкодер созданный на основе двойного компаратора LM393 и щелевого датчика предназначен для совместного использования со специальными дисками (диск в комплект не входит) (см. рис. 1).
Диски одеваются на вал редуктора или электродвигателя, чтобы микроконтроллер получал информацию непосредственно от энкодера о количестве оборотов проделанных двигателем.
Рис. 1
Энкодер RKP-MWES-LM393 станет полезным компонентом для любого робота под управлением микроконтроллера. Датчик оборотов имеет специальное отверстие в плате, что облегчает его монтаж и крепление на любую роботизированную платформу или шасси робота.
Энкодер для Ардуино отзывы
























