Статья о двухканальном драйвере моторов RKP-MDL298-01A на микросхеме L298N.
Блок схема, подключение к Ардуино, подключение шагового двигателя и DC-моторов.
Драйвер RKP-01A на микросхеме L298N обеспечивает полноценное управление шаговым двигателем. Так же его помощью можно контролировать вращение двух независимых коллекторных моторов постоянного тока (DC-моторов).
Блок схема драйвера L298 для управления коллекторными моторами
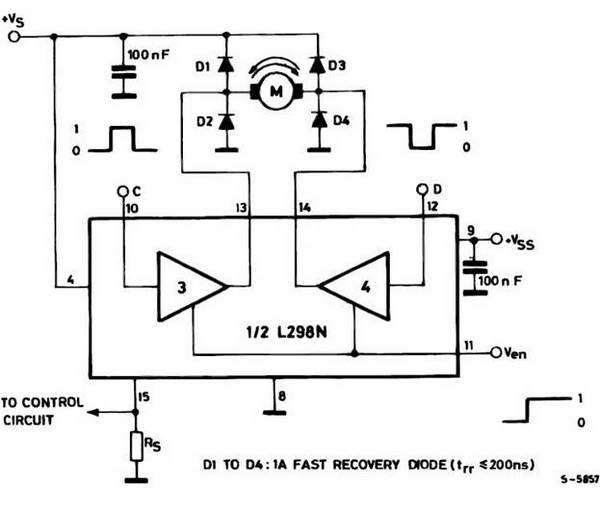
Это упрощенная схема одной половинки драйвера моторов на микросхеме L298. Схема драйвера состоит их двух частей – управляющей и силовой.
Напряжение питания управляющей части драйвера подается на вывод 9 (+Vss) и может достигать 7 вольт. Если микроконтроллер системы управления роботом питается от +5 вольт, то такое же напряжение подадим на вывод 9. В этом случае уровни сигналов управления микроконтроллера и драйвера будут согласованы. Силовая часть драйвера L298 получает питание через вывод 4 (+Vs) и может достигать +36 вольт.
В нашем случае оно должно быть равно напряжению питания моторов плюс 1 вольт. Запас в +1 вольт необходим для того, чтобы двигатель нормально питался от силовой части драйвера. Примерно 1 вольт останется на силовых ключах драйвера, при токе через мотор около 1А. Об этом нужно помнить, если хотите, чтобы ваш робот бегал, а не ползал.
Наличие защитных диодов D1-D4 обязательно. При их отсутствии, энергия удержания, накопленная в индуктивности обмотки мотора, обязательно уничтожит силовые ключи драйвера L298. Защитные диоды нужно применять скоростные и сильноточные. Ток защитных диодов не менее 1А, время рассасывания не основных носителей не более 200nS. Вполне подойдут диоды 1N5818.
Также необходимы фильтры для сглаживания пульсаций на входах +Vss и +Vs. Если не планируете измерять или ограничивать ток через моторы, то выводы 1 (sens A) и 15 (sens B) драйвера L298 необходимо присоединить к минусу Vs ( «на землю» ).
Схема драйвера моторов L298N для робота с управлением от микроконтроллера
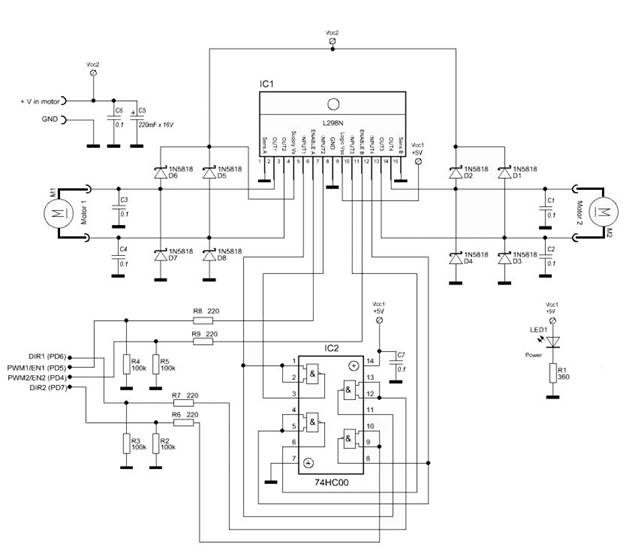
К драйверу L298N можно подключить два мотора, ток через каждый мотор не более 1 А, кратковременно до 1.6 А. Этого должно хватить для полноценного питания двух моторов робота.
Для каждого мотора – два входа управления.
На вход DIR подаем логические “0″ или “1″ от микроконтроллера. Сигнал от микроконтроллера на этом входе задает направление вращения мотора.
Вход PWM: при логическом “0″ на входе мотор стоит, при логической “1″ на входе PWM мотор вращается. При изменяемой скважности сигнала на входе PWM, появляется возможность изменять скорость вращения мотора.
Сигнал логического “0″ – это сигнал с напряжением меньше 1 вольта.
Сигнал логической “1″ – напряжение выше 2.5 вольт.
Фактически сигнал PWM подается на вход разрешения (Ven) работы силовой части драйвера.
Микросхема 74HC00 применена для повышения помехоустойчивости драйвера L298.
