Статья о принципах работы ультразвукового датчика расстояния для Ардуино на примере ультразвукового дальномера HC-SR04 (современная версия датчика HY-SRF05).

Работа ультразвукового датчика измерения расстояния повторяет принцип эхолокации, как у летучих мышей.
Датчик HC-SR04 имеет излучатель и приемник ультразвуковых волн. Датчик излучает короткий ультразвуковой импульс (в момент времени 0), который отражается от объекта и принимается сенсором. Расстояние рассчитывается исходя из времени до получения эха и скорости распространения звука в воздухе.
То есть, сенсор получает сигнал эха, и выдаёт расстояние, которое кодируется длительностью электрического сигнал на выходе датчика (Echo).
Следующий импульс может быть излучён, только после исчезновения эха от предыдущего. Это время называется периодом цикла (cycle period). Рекомендованный период между импульсами должен быть не менее 50 мс.
Если на сигнальный пин (Trig) подаётся импульс длительностью 10 мкс, то ультразвуковой модуль будет излучать восемь пачек ультразвукового сигнала с частотой 40 кГц и обнаруживать их эхо. Измеренное расстояние до объекта пропорционально ширине эха (Echo) и может быть рассчитано по формуле, приведённой на графике расположенном ниже.
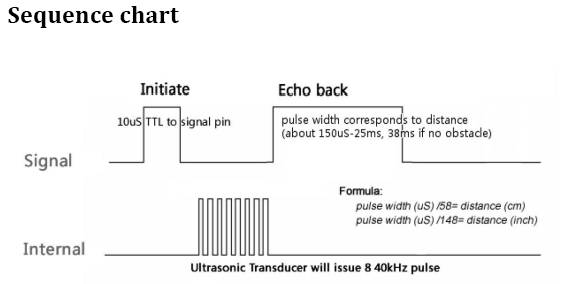
Документация на сенсор, так же указывает, что если никаких препятствий не обнаружено, то на выходе будет сигнал с длительностью 38 мс.

