Драйвер моторов одноканальный BTS7960 до 43А











Описание
Модуль управления мотором RKP-BTS7960 на микросхеме BTS7960.
С его помощью можно управлять одним коллекторным двигателем (DC-мотором). Драйвер рассчитан на напряжение питания двигателя от 5.5 до 27.5 Вольт постоянного тока до 43 А.
Но так как клеммник установленный на плате не рассчитан на такие токи, то для долговременной работы рекомендуется использовать двигатели с током потребления до 10 А. С помощью данного драйвера можно управлять скоростью двигателя, направлением его движения, выполнять торможение и контролировать нагрузку которую испытывает двигатель.
- Драйвер RKP-BTS7960 – мощный интегральный полумостовой драйвер, разработанный компанией Infineon для интеллектуального управления электродвигателями.
- Выполнен на быстродействующих чипах BTS7960 с низким внутренним сопротивлением, поэтому является идеальным решением для проектов с высоким энергопотреблением.
- Модуль поддерживает управление двигателем с помощью ШИМ при максимальной частоте 25 КГц, имеет защиту от короткого замыкания, перегрева и превышения выходного напряжения.
- Возможность каскадного соединения с аналогичными модулями.
- Модуль драйвера совместим с любыми микроконтроллерами, в том числе и Arduino.
Характеристики RKP-BTS7960:
Микросхема драйвера: BTS7960
Напряжение питания двигателя: от 5.5 до 27.5 В постоянного тока (вне указанного диапазона драйвер перейдёт в режим защиты)
Напряжение питания логики: 5 В постоянного тока
Максимальная частота ШИМ на управляющих выводах: 25 кГц
Максимально допустимы ток мотора: 43 А (кратковременно)
Максимально допустимы ток мотора: 10 А (долговременно)
Напряжение логических уровней на управляющих выводах: 3.3 или 5 В
Внутреннее сопротивление 16 мОм
Размер: 40 x 50 х 12 мм
Вес: 50 гр.
Описание четырехконтактного разъема с винтовыми зажимами:
• М+ – подключение электродвигателя
• М- – подключение электродвигателя
• B+ – подключение плюсового вывода внешнего мощного источника питания для электродвигателя от 5.5 до 27.5 Вольт
• B- – подключение минусового вывода внешнего мощного источника питания для электродвигателя от 5.5 до 27.5 Вольт
Описание восьмиконтактного разъема:
VCC – напряжение питания +5 В от платы микроконтроллера
GND – общий провод питания GND от платы микроконтроллера
R_EN – разрешение включения вращения электродвигателя в одну сторону (HIGH)
L_EN – разрешение включения вращения электродвигателя в противоположную сторону (HIGH)
RPWM – уровень сигнала PWM для регулирования скорости включения вращения электродвигателя в одну сторону
LPWM – уровень сигнала PWM для регулирования скорости включения вращения электродвигателя в противоположную сторону
R_IS – для отслеживания уровня тока при вращении электродвигателя в одну сторону
L_IS – для отслеживания уровня тока при вращении электродвигателя в противоположную сторону
Подключение и управление драйвером BTS7960 смотрите на вкладке "Подключение драйвера".
Драйвер моторов одноканальный BTS7960 до 43А отзывы

Подключение драйвера
Подключение драйвера BTS7960
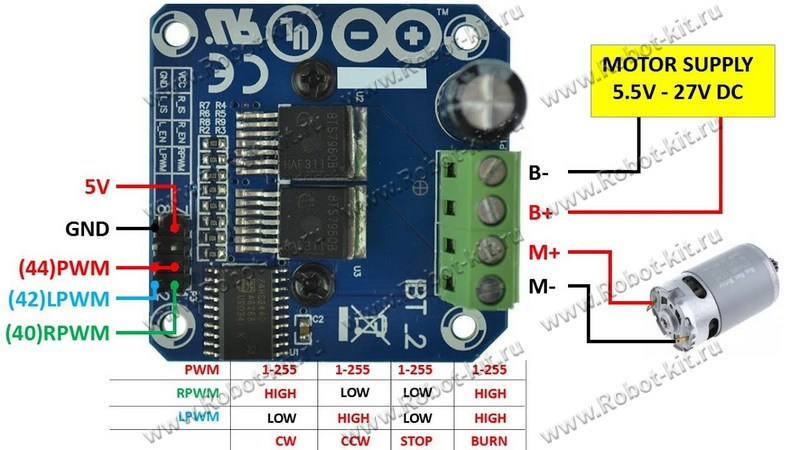
- Двигатель подключается к выводам «M+» и «M-» клеммника.
- Напряжение питания двигателя (5,5 - 27,5 В постоянного тока) подаётся на выводы «B+» и «B-» клеммника.
- Напряжение питания логической части (5 В постоянного тока) подаётся на выводы «Vcc» и «GND»
- Драйвером можно управлять по 2, 3 или 4 проводам:
- Подключение драйвера мотора к Arduino по 2 проводам:
- Выводы «L_EN» и «R_EN» драйвера соединяются друг с другом и подключаются к «Vcc» (не участвуют в управлении).
- Вывод «L_PWM» подключается к любому выводу Arduino поддерживающему ШИМ.
- Вывод «R_PWM» подключается к любому выводу Arduino поддерживающему ШИМ.

- Управление драйвером мотора по 2 проводам:
- Движение вперёд с регулировкой скорости: «L_PWM» = 0, «R_PWM» = ШИМ (чем выше ШИМ тем выше скорость).
- Движение вперёд с регулировкой скорости: «L_PWM» = ШИМ, «R_PWM» = 1 (чем выше ШИМ тем ниже скорость).
- Движение назад с регулировкой скорости: «L_PWM» = ШИМ, «R_PWM» = 0 (чем выше ШИМ тем выше скорость).
- Движение назад с регулировкой скорости: «L_PWM» = 1, «R_PWM» = ШИМ (чем выше ШИМ тем ниже скорость).
- Торможение: «L_PWM» = «R_PWM» = 0 или 1 (максимальное торможение).
- Преимущества и недостатки схемы управления по 2 проводам:
- Явное преимущество схемы - минимальное количество задействованных выводов Arduino.
- Так как на входах «L_EN» и «R_EN» постоянно установлена 1 (они подключены к «Vcc»), значит выходы мотора «M+» и «M-» не переходят в состояние высокого импеданса (не отключаются), следовательно, можно осуществлять торможение скоростью (уменьшение скорости приводит к торможению). Это-же факт можно отнести и к недостаткам схемы, так как в ней нельзя освободить мотор, на его выводах «M+» и «M-» всегда установлены потенциалы «B+» и/или «B-».
- Подключение драйвера мотора к Arduino по 3 проводам:
- Выводы «L_EN» и «R_EN» драйвера соединяются друг с другом и подключаются к любому выводу Arduino поддерживающему ШИМ.
- Вывод «L_PWM» подключается к любому выводу Arduino.
- Вывод «R_PWM» подключается к любому выводу Arduino.

- Управление драйвером мотора по 3 проводам:
- Движение вперёд с регулировкой скорости: «L_PWM» = 0, «R_PWM» = 1, «EN» = ШИМ (чем выше ШИМ тем выше скорость).
- Движение назад с регулировкой скорости: «L_PWM» = 1, «R_PWM» = 0, «EN» = ШИМ (чем выше ШИМ тем выше скорость).
- Свободное вращение: «L_PWM» и «R_PWM» не имеют значения, «EN» = 0 (мотор электрически отключён).
- Торможение: «L_PWM» = «R_PWM» = 0 или 1, «EN» = ШИМ (чем выше ШИМ тем сильнее торможение).
- Преимущества и недостатки схемы управления по 3 проводам:
- Не смотря на большее количество проводов, схема управления выглядит проще: «L_PWM» и «R_PWM» управляют направлением, а «EN» скоростью. Если на входах «L_PWM» и «R_PWM» одинаковый логический уровень, то «EN» управляет торможением.
- Есть возможность регулировать уровень торможения при помощи ШИМ без подачи напряжения (разности потенциалов) на двигатель.
- При подаче логического 0 на вход «EN», мотор электрически отключается от схемы. Например, если управляемое мотором устройство стоит на горке и на всех входах «L_PWM», «R_PWM» и «EN» установлена 1, то оно никуда не поедет, но стоит сбросить в 0 уровень на входе «EN», как мотор освободится и устройство скатится с горки. Еще одним примером может быть экономия электроэнергии: после достижения требуемой скорости, сбрасываем уровень на входе «EN» в состояние логического 0 и устройство будет продолжать движение по инерции, далее устанавливаем на входе «EN» логическую 1, набираем скорость и снова сбрасываем в 0.
- К недостаткам схемы подключения по 3 проводам можно отнести то, что в схеме не предусмотрено торможение скоростью.
- Подключение драйвера мотора к Arduino по 4 проводам:
- Выводы «L_EN», «R_EN», «L_PWM» и «R_PWM» подключаются к выводам Arduino поддерживающим ШИМ (иначе целесообразнее использовать схему с 2 или 3 проводами).
- Управление драйвером мотора по 4 проводам:
- В такой схеме можно осуществлять управление по любому из рассмотренных ранее вариантов управления, переключаясь с одной схемы на другую по мере необходимости.
- Преимущества и недостатки схемы управления по 4 проводам:
- Достоинство схемы заключается в её универсальности, можно использовать достоинства двух предыдущих схем и избавиться от их недостатков.
- Явный недостаток схемы - максимальное количество задействованных выводов Arduino.
Питание
- Напряжение питания двигателя (5,5 - 27,5 В постоянного тока) подаётся на выводы «B+» и «B-» клеммника.
- Напряжение питания логической части (5 В постоянного тока) подаётся на выводы «Vcc» и «GND».























