В статье мы подробно разберем принцип работы шагового двигателя 28BYJ-48-5V, особенности и подключение драйвера на базе микросхемы ULN2003.
В предыдущей статье =>> мы кратко разобрали подключение шагового двигателя 28BYJ-48-5V к Arduino через драйвер.
Для подключения 4-х фазного шагового двигателя с редуктором 28BYJ-48-5V используется драйвер на базе микросхемы UNL2003A.

Добавим лишь немного теории о принципах работы шагового двигателя 28BYJ-48-5V.
Дискретное перемещение вала двигателя 28BYJ-48-5V позволяет повернуть вал ровно на 60 или 279 градусов и зафиксировать. Двигатель содержит две обмотки, причем каждая имеет отвод от середины. Получается 4 фазы. Отводы обмоток соединены вместе, как изображено на схеме, к ним подключен красный провод.
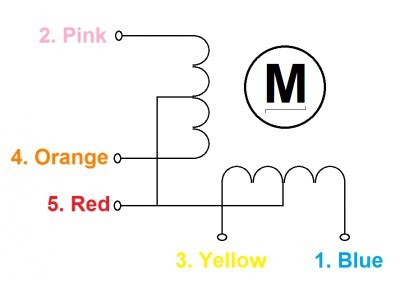
В результате каждый из контактов четырех фаз соединен с красным проводом.
Двигатель 28BYJ-48-5V относится к однополярным (униполярным) благодаря схеме соединения фаз. К красному проводу подключается питание. Фазы коммутируются силовой электроникой.
Для поворота на требуемый угол или выполнения некоторого количества оборотов на фазы двигателя подают серию импульсов, под действием которых вал поворачивается на серию шагов.
Импульс тока вызывает перемещение вала на угол обусловленный углом, занимаемым на роторе одним магнитом. Увеличение количества полюсов ротора уменьшает шаги, что позволяет нарастить точность позиционирования.
Чаще всего используются два способа управления шаговым двигателем 28BYJ-48-5V: 4 ступени импульсов и 8 ступеней.
В 4-ступенчатом управлении всегда подключены к питанию две из четырех обмоток двигателя – полношаговый метод управления.
Программная библиотека Stepper для Arduino IDE использует именно такой способ управления.
Если фазам по цвету проводов присвоить обозначения А синий, Б розовый, В желтый, Г оранжевый, то получим наименования фаз А, Б, В, Г. Их поочередное включение можно представить в виде последовательной смены сочетаний включенных фаз АБ-БВ-ВГ-ГА-АБ.
В 8-ступенчатой последовательности включается сначала одна фаза потом две, потом опять одна следующая, снова две и так далее. Управление мотором происходит в соответствии с последовательностью: А-АБ-Б-БВ-В-ВГ-Г-ГД-Д-ДА-А.
Драйвер моторов на микросхеме UNL2003A.
Существуют разные модели драйверов (контроллеров) шаговых двигателей. Среди них можно выделить самые популярные в DIY разработках на базе Arduino: L293, ULN2003, A3967SLB.
Как правило, шаговый двигатель 28-BYJ48 используют в паре с драйвером ULN2003.
Список драйверов на базе UNL2003A Вы найдете в конце статьи в разделе "Рекомендуемые товары:" или в категории Драйверы двигателей =>> нашего сайта Robot-Kit.ru.
На фото ниже драйвер шагового двигателя на базе UNL2003A выполнен в формате "микро" =>>

Модуль управления (драйвер) на базе микросхемы UNL2003A предназначен для управления однополярным четырехфазным шаговым двигателем.
Микросхема ULN2003 по сути представляет собой массив транзисторов, включенных по схеме Дарлингтона. Микросхема ULN2003 позволяет управлять нагрузкой до 500 мА (один ключ).
Модуль принимает на себя нагрузку по силовой коммутации токов фаз мотора, защищая управляющую логическую схему от перегрузки по току и от перегрева. Например, при возрастании нагрузки на валу, в этот момент потребление тока увеличивается.
На плате модуля есть 4 входа для микроконтроллера: IN1..IN4. Пять выходов на двигатель, и два контакта питания. Также есть перемычка, разрывающая цепь питания двигателя.
Примечание. Плата согласования Arduino и шагового двигателя на основе UNL2003A имеет всего одну перемычку, которая замыкает 3 и 4 выводы. Данная перемычка подаёт питание на светодиоды с вывода 2 (так как выводы 2 и 3 спаяны вместе). Если на шаговый двигатель подаётся питание +5 В (как в нашем случае), то данная перемычка позволяет наблюдать за переключением выводов управления шаговым двигателем. Отслеживание свечения светодиодов помогает отладить схему соединения двигателя и управляющую программу. В дальнейшем для экономии тока питания перемычка снимается.
Подключение моторов на микросхеме ULN2003A
Схема соединения двигателя 28BYJ-48-5V и модуля управления ULN2003A.

Как правило, кабель двигателя 28BYJ-48-5V уже имеет разъем с ключом, который вставляется в плату драйвера только в правильном положении. В нашем случае это именно так.
Четыре управляющих входа, помеченные как IN1-IN4, должны быть подключены к четырем цифровым выводам Arduino. Подключаем питание GND к GND и VCC к VIN (не для постоянного использования). Помним, что не рекомендуется запитывать двигатель 28BYJ-48-5V (через драйвер) непосредственно от контакта 5V на плате Arduino. Если для питания Arduino и мотора используются различные источники питания, то необходимо объединить выводы «земля» источников вместе.
Ниже приведена схема подключения на примере модуля ULN2003, платы Arduino UNO R3 и двигателя 28BYJ-48-5V.

ПРОГРАММИРОВАНИЕ В ARDUINO IDE



